手術支援ロボット ダヴィンチ
〈開胸器を使用しない心臓手術〉
近年、心臓手術はより身体的な負担の少ない方法へと進化を遂げています。
その中でも特に最先端に位置する低侵襲手術が、手術支援ロボット、da Vinci を用いた手術です。
ロボット手術とは?
ロボット手術では皮膚切開の位置は従来のMICSと同じですが、切開の傷はさらに小さくて済みます。また、ロボットアームの細やかな動きと広い可動域が、より繊細な手術を可能にします。このような点から、ロボット支援下手術は、MICSがさらに進化したものと考えていただければよいかもしれません。
MICS手術は僧帽弁、三尖弁、大動脈弁の形成術や弁置換術、狭心症に対する冠動脈バイパス術、心臓腫瘍切除術、心房細動に対するMaze手術や左心耳閉鎖術、等を対象としています。
ロボット手術は、その中でも僧帽弁閉鎖不全症や三尖弁閉鎖不全症に対する弁形成術、狭心症に対する冠動脈バイパス術を行う事が保険診療上認められております。
MICSについて
従来の胸骨正中切開(胸の真ん中を切って心臓にアプローチする)という方法ではなく、左右どちらかの胸に4-6cm程度の
小さな切開をおき手術を行う方法をMICS(Minimally Invasive Cardiac Surgery:低侵襲心臓手術:ミックス)と呼びます。
da Vinci 紹介ビデオ
ダ・ヴィンチ手術とは?
Da Vinci(ダヴィンチ)という手術支援ロボットは、1990年代にアメリカで開発されました。
日本では、2018年にロボット支援下の手術が保険収載され、限られた施設でのみ手術可能となっています。
当院でも、2020年より本格的にロボット支援下の心臓手術を行っています。
da Vinci はコンソールで操作した事をロボットアームがリアルタイムに実行するというシステムになっています。以下で詳しく説明します。

コンソール

ビジョンカート

ペイシェントカート
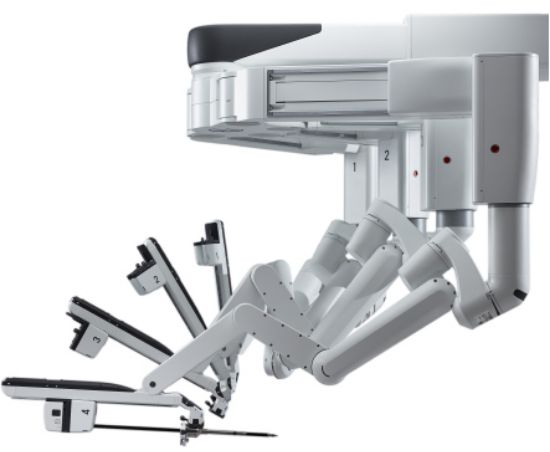
手の動きを超える4本のロボットアーム
ダヴィンチには、合計4本(カメラ1本、鉗子〈かんし〉3本)のロボットアームがついています。カメラアームには3D内視鏡が取り付けられ、その視野は非常に鮮明です。残り3本のアームの先端にはさまざまな形の鉗子類が装着でき、たとえば、つまむ・切る・かき出す・縫合するなど、用途に応じて付け替えます。ロボットアームの可動域は人間の手の動きを凌駕しており、細やかな手術が可能になります。



術者は遠隔で操作を行い、
手足と視覚を駆使して手術を主導
術者は、コンソールと呼ばれるコックピットのような場所から遠隔で操作を行います。フットスイッチで鉗子やカメラを切り替えることが可能です。このように術者は3D内視鏡で捉えた画像を見ながら、手足と視覚を駆使し、ダヴィンチの“司令塔”として手術を主導します。
低侵襲手術の極みに位置し、理想に近い手術方法ではありますが、ロボット支援下手術にもメリット・デメリットがあります。以下で解説します。

ロボット支援下手術は、人間の手よりも可動域が広い3本のアームを自由に動かして手術部位の視野を良好に保つことができます。そのため、精密な手術が可能です。また、基本的には通常のMICSより小さな切開で手術を行うことができます。このような点はロボット支援下手術のメリットといえるでしょう。
一方、ロボットアームには触覚がないため、組織や臓器にかかる負荷、糸を結ぶ際の力加減などを意識する必要があります。また、通常の手術と異なり術者は手術台と患者さんから離れた場所でロボットを操作し、ほかのスタッフ(助手、麻酔科医、看護師、臨床工学技士など)に指示を出して手術を主導しなければなりません。これらの点から、術者は画面だけでなく常に手術場を注意深く観察し、さまざまな情報を得る必要があり、そのぶん広い視野が求められます。このように、広い視野が必要であり難易度の高い手術という点は一つのデメリットといえますが、これらは、術者の経験でカバーすることが可能な部分でもあります。
Robot – 冠動脈バイパス術
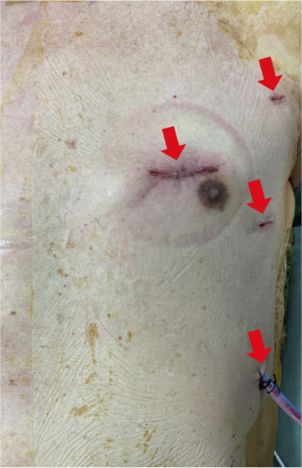
手術直後の創部

術後2週間の創部
Robo冠動脈バイパス術
Robot – 僧帽弁形成術

術後2週間の創部
Robo僧帽弁形成術
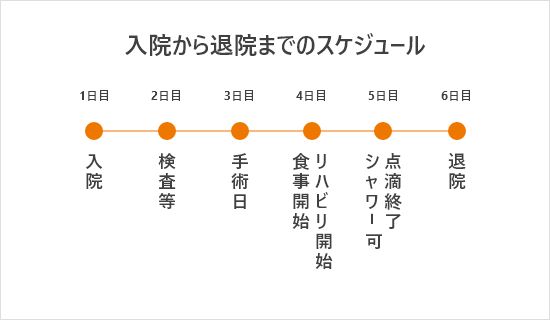
入院から退院まで
手術時間、入院期間、傷の大きさ
ロボット支援下手術の手術時間は、代表的な僧帽弁形成術、冠動脈バイパス術で 2.5〜4時間ほどです。
また、一般的な入院期間は手術前に1〜2日、手術後に4〜5日ほどです。合計でおおむね1週間以内の入院期間で済むことがほとんどです。
傷の大きさは術式にもよりますが、3cmほどの切開を1か所、1〜2cmほどの切開を数か所必要とします。いずれの切開でも骨を切らないため身体的な負担は少なく、手術の翌日から歩行と食事ができ、リハビリも開始します。通常、術後2日目に点滴が終了となり、術後2〜3日でシャワーを浴びることが可能です。
術式にもよりますが、術後4〜5日で退院できる状態になります。
当院の実績
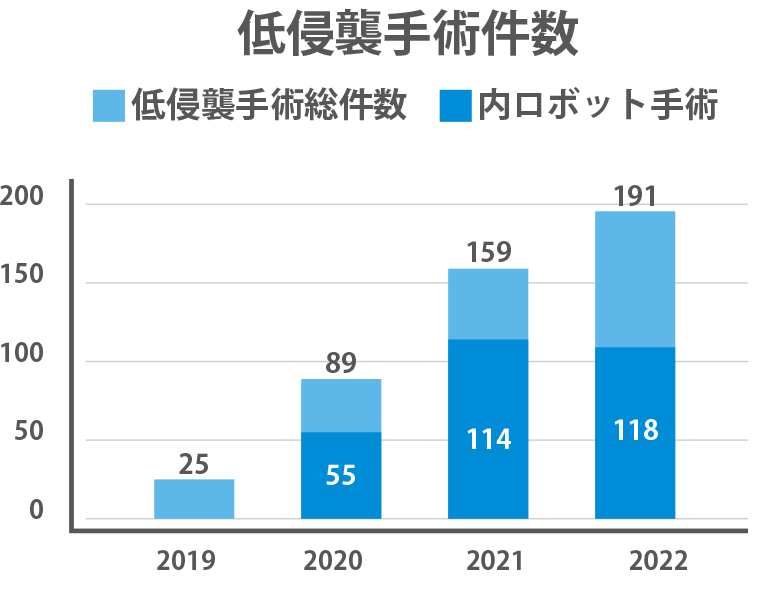
当院では2020年より本格的にロボット支援下心臓手術(僧帽弁手術、三尖弁手術、冠動脈バイパス術など)を始め、年間100例以上のペースでロボット心臓手術を安全に行っており、これは日本でも指折りの件数です。
